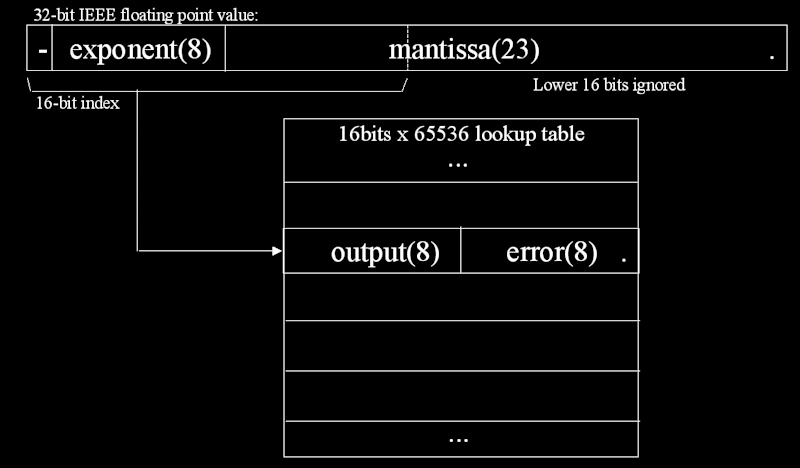
The table is filled by putting 0x8000 into the lower bits of the floating point number, calculating the output result in the range 0 to 1.0, and storing that result multiplied by 0xFF00 into the table.
The top 8 bits from the table are the output byte.
The bottom 8 bits are the "error" value, and are used to do error diffusion dithering. They are added to the next value looked up in the table. The top 8 bits of this 16-bit sum are used as the next byte to write, and the bottom 8 bits are used as the next error value.
This error diffusion will produce stripes in any image that has identical scanlines. To prevent this, a random horizontal position is chosen to start the error diffusion at, and it proceeds in both directions away from this point.
Many error diffusion algorithims will reset the error to zero when a 0 or 1 value is encountered. This can produce stripes on the other side of a solid area of 0 or 1. My algorithim preserves the error through these spaces so the other side starts out at a random value.